
این روش کنترل نوآورانه بارهای موج موجود در شرایط واقعی دریا را محاسبه می کند که بر عملکرد مانور کشتی های خودمختار تأثیر می گذارد و یک کنترل کننده بهینه برای ناوبری با زمان کارآمد ارائه می دهد. اعتبار: Daejeong Kim از دانشگاه دریایی و اقیانوس کره
مطالعه مانور کشتی در دریا مدتهاست که تمرکز اصلی صنعت کشتیرانی بوده است. با پیشرفت های سریع در کنترل از راه دور، فناوری های ارتباطی و هوش مصنوعی، مفهوم کشتی های سطحی خودکار دریایی (MASS) به عنوان یک راه حل امیدوارکننده برای ناوبری دریایی خودمختار ظاهر شده است. این تغییر نیاز روزافزون به مدلهای کنترل بهینه برای مانور کشتی مستقل را برجسته میکند.
طراحی یک سیستم کنترل برای مانور کشتی با زمان کارآمد یکی از دشوارترین چالشها در کنترل کشتی مستقل است. در حالی که بسیاری از مطالعات این مشکل را بررسی کرده و روشهای کنترل مختلفی از جمله کنترل پیشبینی مدل (MPC) را پیشنهاد کردهاند، اکثر آنها بر روی کنترل در آبهای آرام متمرکز شدهاند که شرایط عملیاتی واقعی را نشان نمیدهند.
در دریا، کشتیها به طور مداوم تحت تأثیر بارهای خارجی مختلف قرار میگیرند که بارهای ناشی از امواج دریا مهمترین عامل مؤثر بر عملکرد مانور است.
برای رفع این شکاف، تیمی از محققان به سرپرستی دستیار پروفسور دایجونگ کیم از بخش مطالعات همگرایی ناوبری در دانشگاه دریایی و اقیانوس کره در کره جنوبی، یک روش جدید کنترل زمان بهینه برای MASS طراحی کردند. دکتر کیم میگوید: «مدل کنترل ما نیروهای مختلفی را در نظر میگیرد که روی کشتی عمل میکنند، و MASS را قادر میسازد تا اهداف را در شرایط پویای دریا بهتر هدایت کند و ردیابی کند». مطالعه آنها در مهندسی اقیانوس.
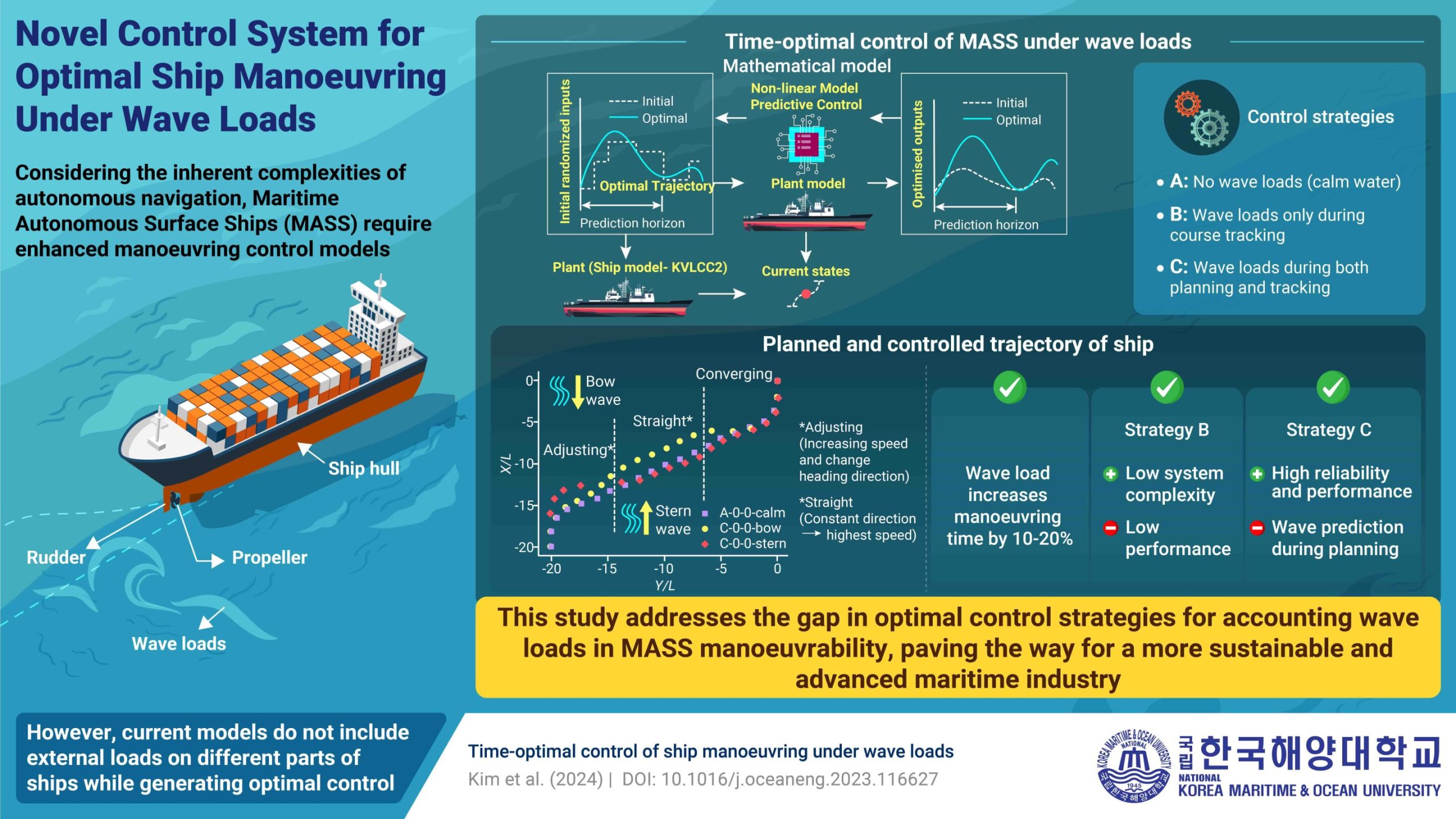
در قلب این سیستم کنترل نوآورانه، یک مدل کشتی ریاضی جامع وجود دارد که نیروهای مختلف در دریا، از جمله بارهای موج، اعمال بر بخشهای کلیدی کشتی مانند بدنه، پروانهها و سکانها را در دریا به حساب میآورد. با این حال، این مدل را نمی توان به طور مستقیم برای بهینه سازی زمان مانور استفاده کرد.
برای این کار، محققان یک مدل بهینهسازی زمانی جدید ایجاد کردند که مدل ریاضی را از یک فرمول زمانی به یک فرمول مکانی تبدیل میکند. این با موفقیت زمان مانور را بهینه می کند.
این دو مدل در یک کنترل کننده MPC غیر خطی برای دستیابی به کنترل زمان بهینه ادغام شدند. آنها این کنترلر را با شبیه سازی یک مدل کشتی واقعی در حال حرکت در دریا با بارهای موج متفاوت آزمایش کردند.
علاوه بر این، برای برنامهریزی و ردیابی مؤثر دوره، محققان سه استراتژی کنترلی را پیشنهاد کردند: استراتژی A، بارهای موج را در هر دو مرحله برنامهریزی و ردیابی حذف میکند و به عنوان یک مرجع عمل میکند. استراتژی B شامل بارهای موج فقط در مرحله برنامه ریزی بود، و استراتژی C شامل بارهای موج در هر دو مرحله، اندازه گیری تاثیر آنها بر پیشرانه و فرمان است.
آزمایشها نشان داد که بارهای موج زمان مانور مورد انتظار را در هر دو استراتژی B و C افزایش میدهد. با مقایسه این دو استراتژی، محققان دریافتند که استراتژی B با عملکرد پایینتر از استراتژی C سادهتر است و دومی قابل اعتمادتر است. با این حال، استراتژی C با گنجاندن پیشبینی بار موج در مرحله برنامهریزی، بار اضافی را بر روی کنترلکننده قرار میدهد.
دکتر کیم با برجسته کردن پتانسیل این مطالعه اظهار می کند: “روش ما کارایی و ایمنی عملیات کشتی های خودران را افزایش می دهد و به طور بالقوه هزینه های حمل و نقل و انتشار کربن را کاهش می دهد و به نفع بخش های مختلف اقتصاد است.” به طور کلی، مطالعه ما به یک شکاف مهم در مانور کشتی های خودمختار می پردازد که می تواند به توسعه صنعت دریایی پیشرفته تر از نظر فن آوری کمک کند.
اطلاعات بیشتر:
مینگ ژانگ و همکاران، کنترل بهینه زمانی مانور کشتی تحت بارهای موج، مهندسی اقیانوس (2024). DOI: 10.1016/j.oceaneng.2023.116627
ارائه شده توسط دانشگاه دریایی و اقیانوس ملی کره
نقل قول: محققان روش کنترل جدیدی را توسعه می دهند که ناوبری خودکار کشتی را بهینه می کند (2024، 13 مارس) در 14 مارس 2024 از https://techxplore.com/news/2024-03-method-optimizes-autonomous-ship.html بازیابی شده است.
این برگه یا سند یا نوشته تحت پوشش قانون کپی رایت است. به غیر از هرگونه معامله منصفانه به منظور مطالعه یا تحقیق خصوصی، هیچ بخشی بدون اجازه کتبی قابل تکثیر نیست. محتوای مذکور فقط به هدف اطلاع رسانی ایجاد شده است.