پژوهشگران ژاپنی یک سیستم رباتیک ساختهاند که به یک شیلنگ مجهز است و میتواند به خاموش کردن آتش کمک کند.
به گزارش ایسنا و به نقل از نیو اطلس، پژوهشگران «دانشگاه استانی آکیتا» (Akita Prefectural University) در ژاپن، یک شیلنگ آتشنشانی پرنده ساختهاند که با استفاده از فشار آب خود به عنوان یک سیستم پیشرانه دو قسمت معلق میشود و خود را برای مقابله با آتشسوزی هدایت میکند، آب را روی آتش میپاشد. و اپراتورها را ایمن نگه میدارد.
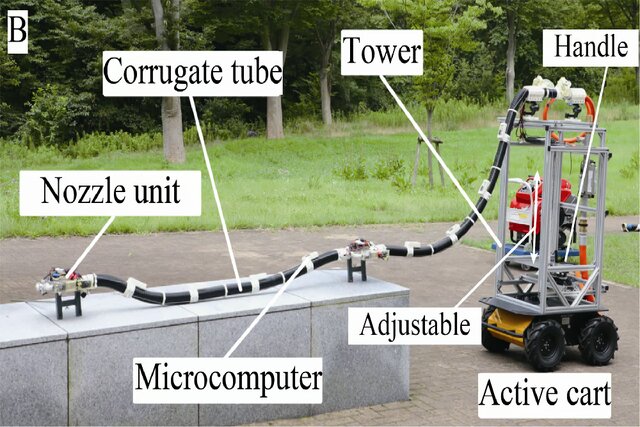
این سیستم اژدهای پرنده دارای دو واحد پیشرانه چهار نازلی است که یکی در انتهای شیلنگ و دیگری سه متر عقب است. هر یک از این عناصر را میتوان شبیه به یک کوادکوپتر در نظر گرفت. سوپاپها و اتصالهایی هستند که روی هر نازل نصب شدهاند و جریان دارند و برای رانش کنترل میکنند، به آن امکان میدهند تا آنطور که یک پهپاد معمولی ممکن است بالا برود باشد، نگه دارد و خود را در هوای هدایت کند.

شیلنگ نمونه اولیه فقط چهار متر طول دارد و به سمت یک ایستگاه کنترل کوچک حرکت میکند که در آنجا یک اپراتور به هدایت کردن وسایل میپردازد. اپراتور با استفاده از دوربینی که روی سر اژدها قرار دارد، به طور معمولی و حرارتی سریع میشود تا ببیند کجا برود و مطمئن شوید که آب را در قسمتهای مورد نیاز میپاشد.
اجراهای پرنده ممکن است هنگام انجام دادن کار خود کمی بینظم باشد و همه آبی که میپاشد، دقیقاً به محل مورد نیاز نرود اما از سوی دیگر، این یک راه هوشمندانه و سرگرمکننده برای فرونشاندن آتش است که در هوای میکشد و آتشنشانها نمیتوانند به آن بپردازند. نزدیک می شوند.
با وجود این، شیلنگ چهار متری مطمئناً برای موقعیتهای بیشتری کافی نیست و این یکی از مشکلاتی است که در حرکت رو به جلو با آن روبهرو میشود، زیرا طول شیلنگ به یک ربات نیاز دارد که شیلنگ سنگینتر را بلند کند و بکشد. بنابراین، به افزایش نیاز خواهد داشت و آن را بدون ایجاد تغییرات اساسی در خودروهای آتشنشانی افزایش میدهد که به آنها میتوانند کار سادهای نباشند. همچنین، این گروه پژوهشی که قطعات پلاستیکی نمونه اولیه بر فراز آتش پرواز میکنند، ذوب میشوند.
با وجود گروههای متعددی که روی این پروژه انجام میشود، میتوان جدول زمانی نسبت به ناامیدکننده گروه دانشگاه آکیتا را انجام داد. دکتر «یویچی آمبه» (Yuichi Ambe) از پژوهشگران این پروژه گفت: ما تخمین میزنیم که برای استقرار ربات ما در شرایط اطفای حریق واقعی، حدود ۱۰ سال دیگر زمان نیاز است.
این پژوهش در مجله «Frontiers in Robotics and AI» به چاپ رسید.
انتهای پیام